
Leap motionとTouchDesigner連携。
使い道はないけどハロウィンネタ風。
一旦できたんですが・・・細部作り直し中ってことで完成系は別に書きます。
ざっくり工程
- Leap motionの指の位置情報を取得
- 各ポイントに球体配置
- Z軸の移動はわかりにくいのでZ軸位置=球体サイズとして、サイズの大小で遠近感をだす
- Feedback Top またはTrail SOPで軌跡を残す
- 線が綺麗すぎるとハロウィン感でなさそうなので、球体にノイズをかけて歪ませる
- 指の本数は処理速度次第で調整
全体像(Geo COMP内)
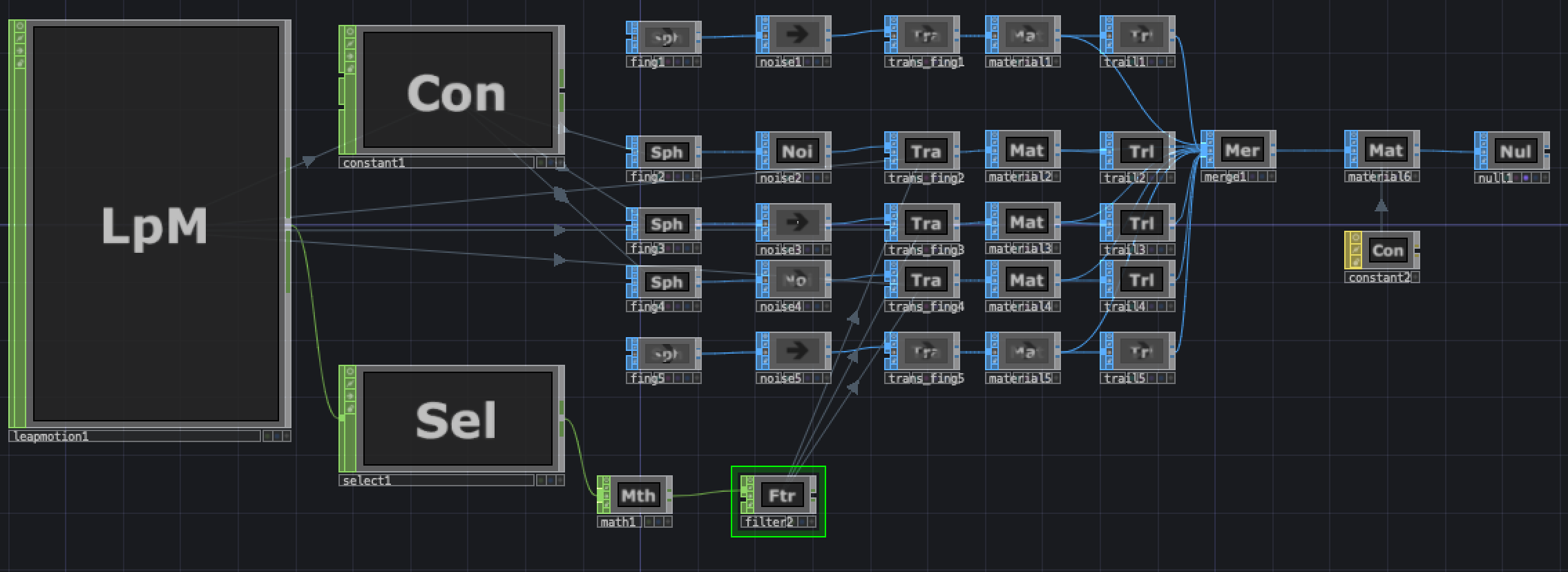
必要なパラメーターだけ抽出+調整
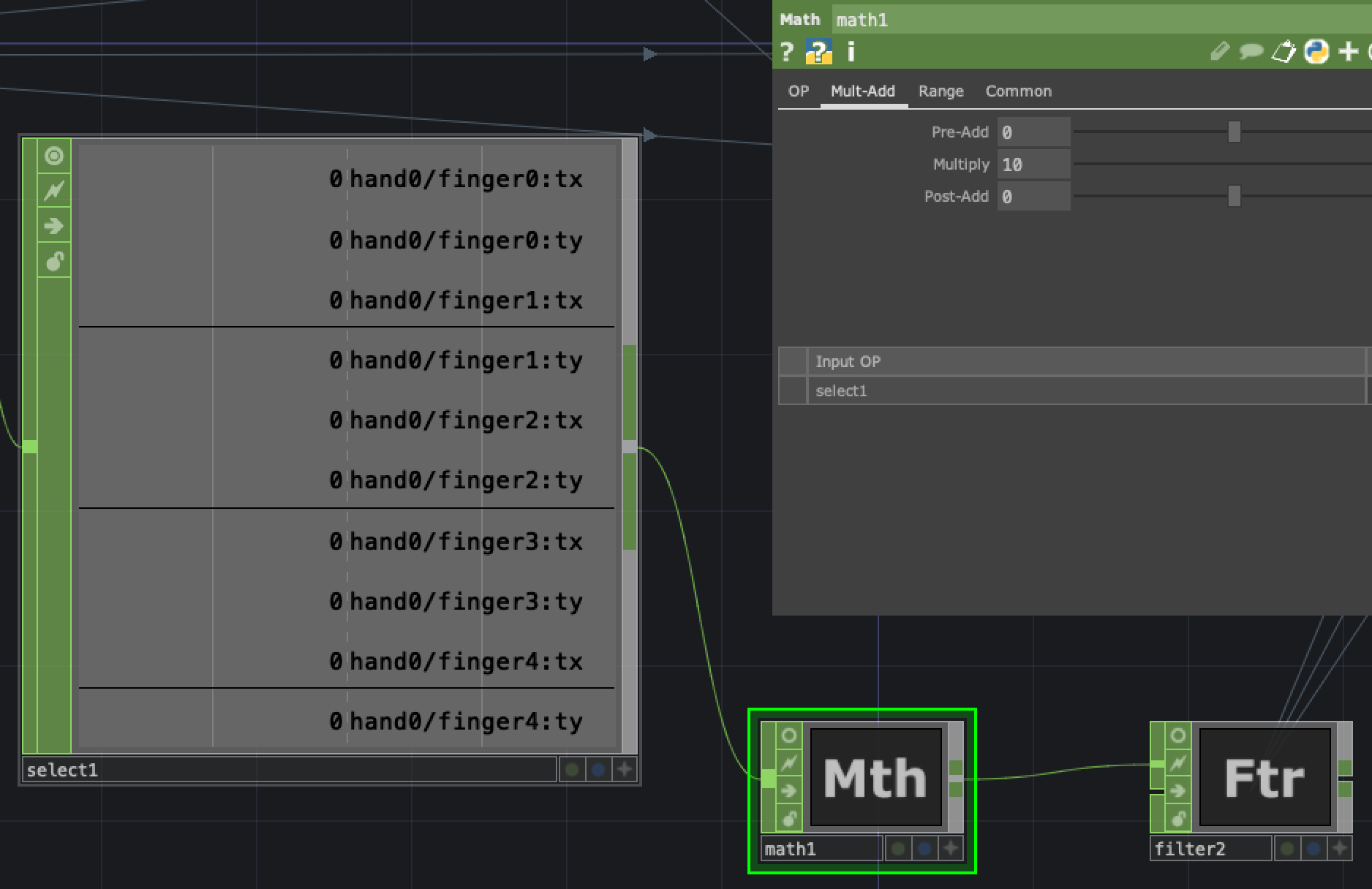 Select CHOPで指5本分のx/y位置を抜き出して、移動範囲がちょうど良くなるようにMath CHOPで調整。Filter CHOPで滑らかに動くように調整。
*なぜか認識範囲に出入りした時だけ滑らかにしてくれない・・・
Select CHOPで指5本分のx/y位置を抜き出して、移動範囲がちょうど良くなるようにMath CHOPで調整。Filter CHOPで滑らかに動くように調整。
*なぜか認識範囲に出入りした時だけ滑らかにしてくれない・・・
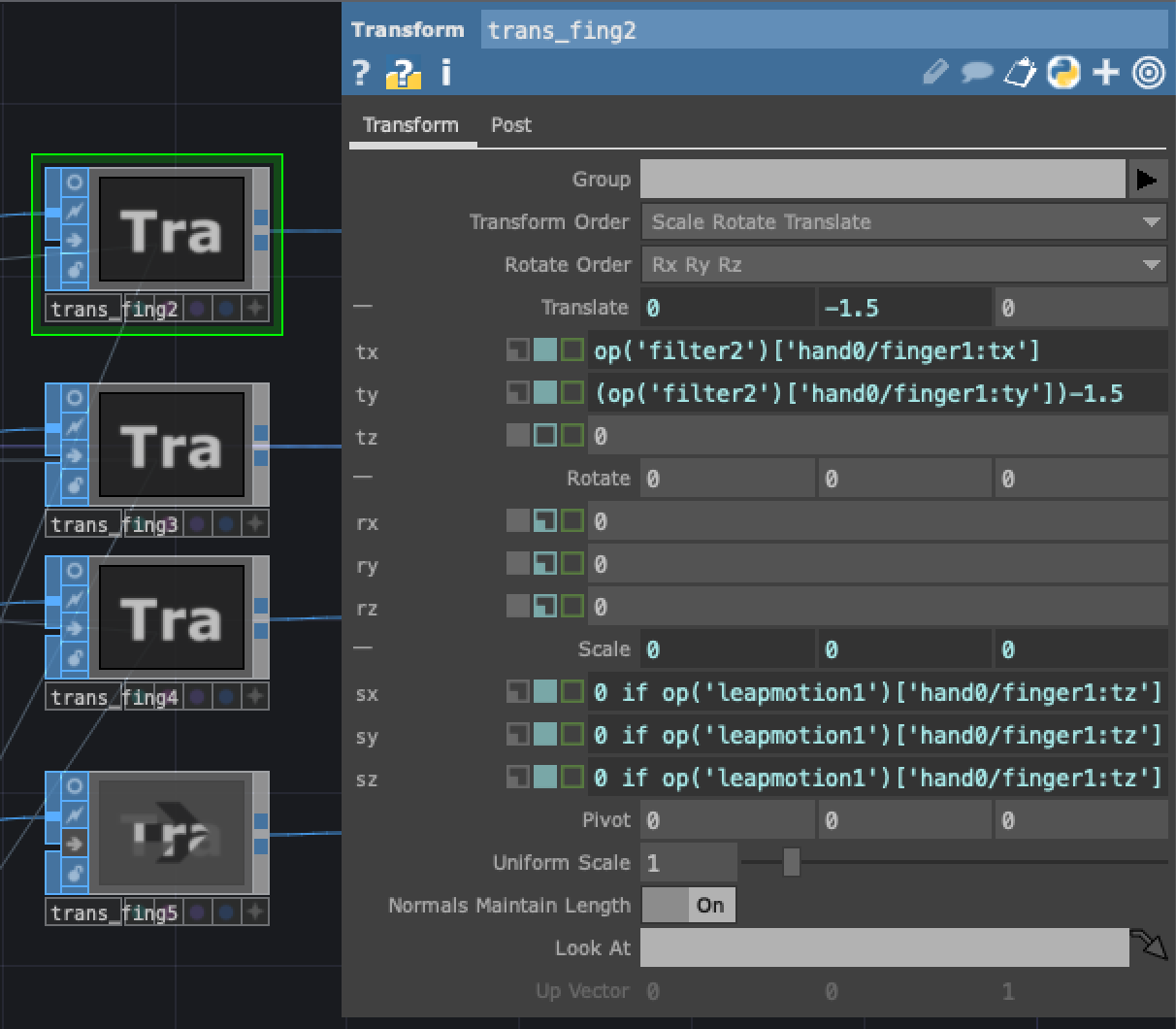
各指がわりの球体を繋いだTransform SOPに代入
問題・改善点
- Leap motionの感知範囲に手が入った時/外れる時それぞれ初期値にから出て初期値に戻るところまで軌跡を書いてしまう。
- そもそも個別の指の認識必要?? 今回のに関しては必要な指の分の球体を配置〜結合、 任意の指or手のひらなどの位置+傾きでやったほうが軽そう・・・
- Leap Motion本体を基準に手前プラス、真上0、奥マイナス値になるから当初予定のZ軸位置=サイズ大小がデフォルトではできない・・・
メモ・参考
Constant MAT
平面テクスチャーの適用。ライトの影響を受けないPhong MAT
3Dテクスチャーの適用。Trail SOP
3Dオブジェクトの移動に準じた軌跡モデルの生成 TouchDesigner 日本語ドキュメント : Trail SOPFilter CHOP
変数を滑らかに(余震を残す) TouchDesigner 日本語ドキュメント : Filter CHOPLeap motion / センサ関連
TouchDesignerでLeap Motionを使う オフィシャルWiki : Leap Motion CHOP TouchDesigner 日本語ドキュメント : Leap Motion CHOP ZIGプロジェクト スマホの各種センサー関連のモニターアプリ。 TDへの読み込みかたは要検証。 TouchDesigner のパフォーマンスチューニング & TIPS 前も乗せた気がするけど忘れてたので・・・関連記事:
 Adobe系メインのデザイナーがTouchDesigner始めました 7回目
Adobe系メインのデザイナーがTouchDesigner始めました 7回目
 Adobe系メインのデザイナーがTouchDesigner始めました 3回目
Adobe系メインのデザイナーがTouchDesigner始めました 3回目
 Adobe系メインのデザイナーがTouchDesigner始めました 9回目
Adobe系メインのデザイナーがTouchDesigner始めました 9回目
 Adobe系メインのデザイナーがTouchDesigner始めました 4回目
Adobe系メインのデザイナーがTouchDesigner始めました 4回目
 1>TouchDesignerでVideo synthesizerを作ってみる:前準備編
1>TouchDesignerでVideo synthesizerを作ってみる:前準備編
 2>TouchDesignerでVideo synthesizerを作ってみる:VCO 編 1
2>TouchDesignerでVideo synthesizerを作ってみる:VCO 編 1
 4>TouchDesignerでVideo synthesizerを作ってみる:VCF1 編
4>TouchDesignerでVideo synthesizerを作ってみる:VCF1 編
 Adobe系メインのデザイナーがTouchDesigner始めました 2回目
Adobe系メインのデザイナーがTouchDesigner始めました 2回目
Sponsored Link